6.5 La interfaz Serial-ATA
Nota: En este capítulo encontrará algunas referencias a la interfaz SAS
("Serial Attached SCSI"). La razón es que, como se indicó en el capítulo dedicado a dicha interfaz
(![]() 6.3), a partir de 2002, los esfuerzos en el desarrollo
de nuevas interfaces serie tienden a converger en una arquitectura única que
englobe los dos estándares serie que venían utilizándose; SAS
y SATA ("Serial ATA/ATAPI").
En ese año, la STA ("SCSI Trade Association") y el Grupo de Trabajo SAS
("Serial Attached SCSI Working Group") anuncian un acuerdo de
colaboración. En Enero del año siguiente, el STA y el Grupo de Trabajo
SATA II ("Serial ATA Working Group") acuerdan aunar esfuerzos para
armonizar sus respectivas especificaciones.
6.3), a partir de 2002, los esfuerzos en el desarrollo
de nuevas interfaces serie tienden a converger en una arquitectura única que
englobe los dos estándares serie que venían utilizándose; SAS
y SATA ("Serial ATA/ATAPI").
En ese año, la STA ("SCSI Trade Association") y el Grupo de Trabajo SAS
("Serial Attached SCSI Working Group") anuncian un acuerdo de
colaboración. En Enero del año siguiente, el STA y el Grupo de Trabajo
SATA II ("Serial ATA Working Group") acuerdan aunar esfuerzos para
armonizar sus respectivas especificaciones.
§1 Antecedentes
En Noviembre del 2001, un grupo de fabricantes de hardware, entre los que se
encontraban Intel, Dell, Maxtor, APT Technologies y Seagate, crearon el
Seria ATA Working Group para hacer frente a las necesidades de la próxima generación interfaces.
Posteriormente, en el 2004, cambiaron el nombre por el de Serial ATA International
Organization (SATA-IO) ![]() .
.
Fig.1 |
Por estas fechas, tras las mejoras de la especificación ATA-7
(![]() 6.1), con la que se habían conseguido
transferencias de 133 MB/s, el modelo tradicional de interfaz PATA ("Parallel ATA")
empezaba a mostrar síntomas de agotamiento, después de haber prestado
eficientes servicios desde su concepción inicial a mediados de los 80.
La idea entre los especialistas era que había que mirar en
otra dirección. Paralelamente, la tecnología de enlaces con
fibra óptica e inalámbrica, habían propiciado grandes avances en
el campo de las comunicaciones serie. En este ambiente, los esfuerzos se
dirigieron a conseguir una nueva especificación de arquitectura serie para la interfaz ATA.
6.1), con la que se habían conseguido
transferencias de 133 MB/s, el modelo tradicional de interfaz PATA ("Parallel ATA")
empezaba a mostrar síntomas de agotamiento, después de haber prestado
eficientes servicios desde su concepción inicial a mediados de los 80.
La idea entre los especialistas era que había que mirar en
otra dirección. Paralelamente, la tecnología de enlaces con
fibra óptica e inalámbrica, habían propiciado grandes avances en
el campo de las comunicaciones serie. En este ambiente, los esfuerzos se
dirigieron a conseguir una nueva especificación de arquitectura serie para la interfaz ATA.
Como se muestra en la figura 1 y es costumbre en los diseños informáticos, la nueva arquitectura, conocida como Serial ATA (SATA), adopta una estructura de capas. La capa de órdenes es un superconjunto de la arquitectura ATA anterior; de forma que los nuevos dispositivos son compatibles con los protocolos ATA tradicionales, y son por tanto compatibles respecto a las aplicaciones existentes. Sin embargo la capa física es distinta, lo que representa un punto de ruptura en el sentido de que los nuevos dispositivos SATA no son compatibles con los anteriores. No obstante, la nueva arquitectura ofrece mejoras suficientes para justificar el cambio.
La idea es que los dispositivos ATA de cualquier tipo (serie o paralelo) compartan un juego común de órdenes, y organizar la conexión de estos dispositivos en una estructura donde existen direcciones, dominios y dispositivos concretos. Una organización que recuerda vagamente la de Internet en la que está inspirada (un dominio ATA contiene un controlador host SATA y un dispositivo).
§2 Capa física
Cada puerto, multiplicador, dispositivo o adaptador SATA o SAS
("Serial Attached SCSI") tiene un número de puerto único de 64 bits. Una especie de MAC
(![]() 12.4)
o código de barras del producto con: un código NAA de 4 bits; un código de fabricante
de 24 bits asignado por la autoridad normativa, y un código de dispositivo a
disposición de cada fabricante de 36 bits [1].
12.4)
o código de barras del producto con: un código NAA de 4 bits; un código de fabricante
de 24 bits asignado por la autoridad normativa, y un código de dispositivo a
disposición de cada fabricante de 36 bits [1].
§2.1 Topología
SATA es una arquitectura en estrella. Es decir, la conexión entre puerto y dispositivo es directa. Por consiguiente, no es un bus en el que coexistan distintos clientes ni concentradores ("Hubs"). Cada dispositivo disfruta la totalidad del ancho de banda de la conexión sin que exista la sobrecarga inherente a los mecanismos arbitraje y detección de colisiones.
El centro de la estrella es un controlador host, embebido en la placa-base, o instalado como una tarjeta en uno
de sus zócalos, que actúa como puente entre los datos paralelos del bus y el
dispositivo SATA. Existen controladores con más de una salida
(generalmente 4 u 8), de forma que pueden conectarse varios
dispositivos. Como veremos más adelante, también se han diseñado multiplicadores
de puerto ![]() que permiten, por así decirlo, subdividir los brazos de la estrella a fin de
poder instalar más dispositivos (conceptualmente funcionan como un "Hub").
que permiten, por así decirlo, subdividir los brazos de la estrella a fin de
poder instalar más dispositivos (conceptualmente funcionan como un "Hub").
Además de la tarea de serializar/paralelizar los datos, una parte importante del trabajo del controlador está relacionada
con los protocolos de conexión y desconexión con el periférico, que son bastante
sofisticados en este tipo de interfaz, ya que está prevista la capacidad de
conexión en caliente ("Hot plug"). El protocolo de conexión es capaz de identificar el tipo de dispositivo
conectado; detectar si funciona correctamente; negociar la velocidad de la conexión, Etc. La interfaz Serial ATA
guarda ciertas similitudes con la interfaz USB (![]() 2.5.3), aunque es mucho más rápida que aquella, y
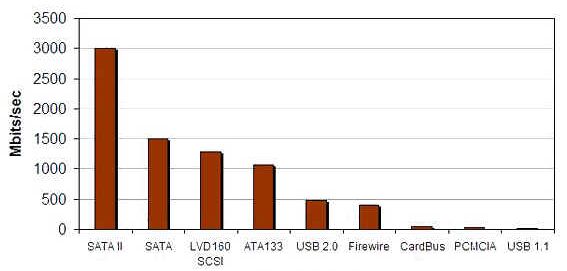
los dispositivos SATA no se alimentan del propio bus. La tabla
adjunta muestra un resumen comparativo con las características de las conexiones más frecuentes.
2.5.3), aunque es mucho más rápida que aquella, y
los dispositivos SATA no se alimentan del propio bus. La tabla
adjunta muestra un resumen comparativo con las características de las conexiones más frecuentes.
| Característica | USB 1 | 1394a | USB 2 | 1394b | SATA-1 | SATA-II |
|
Velocidad de pico MB/s |
1.5 | 50 | 60 | 100 | 150 | 300 |
|
Velocidad típica MB/s |
8 | 40 | 45 | 80 | 150 | 300 |
| Longitud máx cable m. | 6.0 | 4.5 | 6.0 | 4.5 | 1.0 | 2.0 |
|
||||||
Nota: 1394 es conocido también como FireWire o i.Link.
Al referirse a velocidades de transmisión, conviene recordar que en ocasiones
se confunden las unidades de medida, y que las especificaciones de la capa
física se refieren a la tasa real de datos, mientras que otras
especificaciones se refieren a capacidades lógicas. Por ejemplo, dado
que en la comunicación serie asíncrona, incluyendo los bits de inicio y fin
("Start" y "Stop" bits), un Byte de datos ocupa en realidad
10 bits en el canal, resulta que una conexión de 3 Gbps (Gigabits por segundo) en la capa
física, equivale a 300 MBps (Megabytes por segundo) de datos.
Fig. 1a Esquema de conexionado de un cable de datos SATA con apantallado y drenaje. |
§2.2 Cables
Entre las características más evidentes de esta interfaz destaca la simplicidad de los cables de conexión; mucho más
estrechos que los tradicionales cables paralelo. Comparado con el cable "P"
SCSI de 68 conductores (![]() 6.3),
el SATA es mucho más manejable y fácil de instalar. Esto
tiene la ventaja de simplificar las conexiones, además de facilitar la aireación del interior del chasis.
6.3),
el SATA es mucho más manejable y fácil de instalar. Esto
tiene la ventaja de simplificar las conexiones, además de facilitar la aireación del interior del chasis.
Nota: Los que hayan instalado dispositivos internos en el PC (discos, disquetes, CDs, Etc.) recordarán que cuando se necesitaba instalar más de un un dispositivo, especialmente con los controladores ESDI y EISA, los cables de conexión formaban rápidamente una maraña impenetrable en el interior del chasis.
Como se muestra en el esquema de la figura 1a, el cable de señal Serial ATA contiene solo cuatro conductores agrupados en dos pares. Opcionalmente pueden incluir apantallados y conductores de drenaje unidos a los conectores de tierra (ver a continuación). Los conductores suelen ser de 26 a 30 AWG [6]. La primera versión del estándar, que solo contemplaba dispositivos internos, definió un cable de conexión de 1 m; más tarde se ha definido un cable de 2 m. Suficiente para unir un equipo torre situado en el suelo, con una unidad de disco externa, situada quizás sobre la mesa.
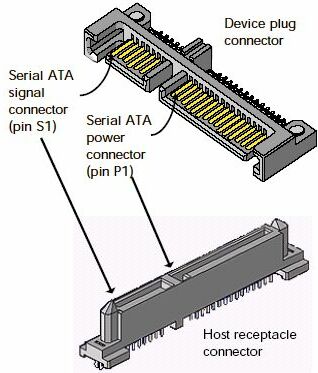
Fig. 2. (imagen cortesía de Molex). |
|||||||||||||||||||||
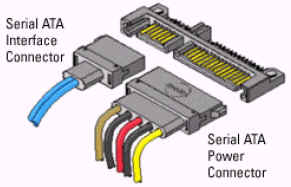
Fig 2.a (imagen cortesía de Molex) |
|||||||||||||||||||||
|
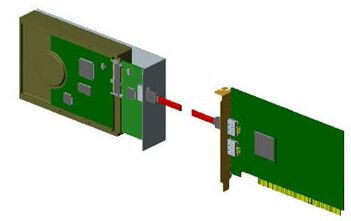
Fig. 3. Dispositivo externo conectado a un controlador host de tarjeta. |
|||||||||||||||||||||
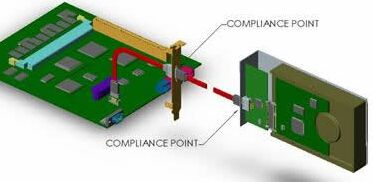
Fig. 4. Dispositivo externo conectado a un controlador host incluido en la placa base. |
|||||||||||||||||||||
|
Tabla 4
|
§2.3 Conexiones
Los dispositivos SATA tienen dos tipos de cables de conexión, de señal y de fuerza. La forma concreta depende de la posición relativa del dispositivo respecto al controlador host. A este respecto caben tres posibilidades:
- Dispositivo interno conectado directamente al controlador host mediante conectores como el de la figura 2.
- Dispositivo interno conectado a una salida del controlador host mediante cables de alimentación y señal (figura 2a).
- Dispositivo externo conectado al controlador host mediante un cable de señal. En estos casos, el dispositivo suele disponer de su propia fuente de alimentación [5]. Son los esquemas mostrados en las figuras 3 y 4.
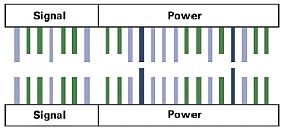
La figura 2 muestra el aspecto de los conectores SATA para conexión directa Controlador host
![]() Dispositivo interno. Puede observarse que el zócalo
SATA estándar tiene dos zonas, aquí se denominan segmentos; una de señal y otra de fuerza
("Signal segment" y "Power segment"). La zona de señal tiene 7 contactos (S1-S7), que
corresponden con otros tantos conductores, de los cuales tres son de tierra,
quedando 2 pares para datos. La designación de contactos se ha indicado en la tabla 2.
Dispositivo interno. Puede observarse que el zócalo
SATA estándar tiene dos zonas, aquí se denominan segmentos; una de señal y otra de fuerza
("Signal segment" y "Power segment"). La zona de señal tiene 7 contactos (S1-S7), que
corresponden con otros tantos conductores, de los cuales tres son de tierra,
quedando 2 pares para datos. La designación de contactos se ha indicado en la tabla 2.
Tabla 2
|
Nomenclatura:
HT+, HT-. Par de señales diferenciales de transmisión del lado del host ("Host Transmitter").
HR+, HR- Ídem de recepción ("Host Receiver").
DT+ y DT- par de señales diferenciales de transmisión del lado del dispositivo ("Device Transmitter").
DR+, DR-. Ídem de recepción ("Device Receiver").
G. Tierra ("Ground").
Como es de esperar, las señales de transmisión del adaptador host se corresponden con las de recepción del dispositivo y viceversa.
Por su parte, el segmento de fuerza tiene 15 contactos (P1-P15) repartidos en 5 zonas de tres conductores cada una según se muestra en la tabla 3. El grupo 1 es de 3.3 V. El grupo 3 es de 5.0 V. y el grupo 5, de 12.0 V. Los grupos intermedios (2 y 4) son conexiones auxiliares de tierra.
Tabla 3
|
Nomenclatura:
G. Tierra ("Ground").
V33 Alimentación de 3.3 V.
V33pc Ídem pre-carga de 5.0 V.
V5 Alimentación de 5.0 V.
V5pc Ídem pre-carga de 5.0 V.
V12 Alimentación de 12.0 V.
V12pc Ídem pre-carga de 12.0 V.
Puede observarse que los conductores de alimentación de 3.3, 5.0 y 12.0 V están duplicados. Para cada tensión existen dos contactos; uno de alimentación normal. El otro, denominado de precarga, debe suministrar la energía para la carga inicial de la circuitería de controlador E/S correspondiente. Cada fuente de alimentación debe proporcionar las intensidades indicadas en la tabla 4.
Nota: Generalmente los dispositivos no utilizan todas las tensiones (algunos pines pueden estar sin conexión). El diseño obedece al deseo de utilizar un solo conector para todos los dispositivos en uso en el momento de publicar la norma.
Como se indicó anteriormente, 0tra característica de los dispositivos SATA (relacionada con lo indicado en
el párrafo anterior) es su capacidad de conexión en caliente. Para mitigar la
aparición de transitorios y facilitar los protocolos de inicio, las lengüetas de
algunos contactos son de mayor longitud que el resto (puede apreciarse en la
fig. 2 ![]() ). De
forma que, en los procesos de conexión, estos pines se conectan antes que
los demás. Paralelamente, en los procesos de desconexión, los pines más largos son los últimos en perder el contacto.
Las distintas longitudes de contactos del lado del controlador y del dispositivo (fig. 5) permite que el proceso
de conexión se realice en tres fases:
). De
forma que, en los procesos de conexión, estos pines se conectan antes que
los demás. Paralelamente, en los procesos de desconexión, los pines más largos son los últimos en perder el contacto.
Las distintas longitudes de contactos del lado del controlador y del dispositivo (fig. 5) permite que el proceso
de conexión se realice en tres fases:
- Se conectan las tierras P4 y P12 que son los contactos más largos del zócalo. Se equilibran potenciales y se neutralizan las posibles descargas de estática.
- Se conectan las tierras restantes P5, P6 y P10, y las tensiones de precarga P3, P7 y P13. Los circuitos de control están listos para funcionar.
- Finalmente se conectan las señales de fuerza P1, P2, P8, P9, P14 y P15. El pin reservado P11, y los pines del conector de señal.
Nota: Los conectores SAS ("Serial Attached SCSI") son muy semejantes al mostrado en la figura
2 ![]() . Su diseño les permite aceptar
conectores SAS y SATA, mientras que los zócalos SATA (fig 2) solo pueden aceptar conectores de su clase.
. Su diseño les permite aceptar
conectores SAS y SATA, mientras que los zócalos SATA (fig 2) solo pueden aceptar conectores de su clase.
|
dispositivo
Fig. 5 controlador |

Fig. 6 |
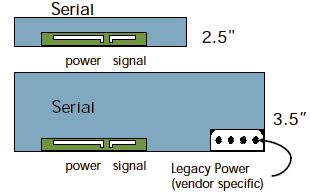
Fig. 7 |
|
Fig. 8 |

Es destacable que el estándar utiliza distinto tipo de conectores para las
conexiones externas e internas. Por ejemplo, los conectores de la figura 4
![]() situados al exterior, son distintos de los que quedarían en la parte interior
del chasis. Los conectores internos son conocidos como tipo
L en razón de su perfil (figura 7), mientras que los externos
tienen una carcasa metálica conectada a tierra para protegerlos de las
interferencias EM y adoptan la forma indicada en la figura 6.
situados al exterior, son distintos de los que quedarían en la parte interior
del chasis. Los conectores internos son conocidos como tipo
L en razón de su perfil (figura 7), mientras que los externos
tienen una carcasa metálica conectada a tierra para protegerlos de las
interferencias EM y adoptan la forma indicada en la figura 6.
También es digno de mención que para facilitar la transición, algunos dispositivos SATA disponen de un conector de fuerza duplicado, de forma que pueden usar el conector de fuerza SATA o el P4 de alimentación tradicional (figuras 7 y 8).
La figura 7 muestra la disposición de contactos en dos dispositivos SATA de 2.5" y 3.5" de factor de forma (son los formatos de disco de equipos portátiles y de sobremesa respectivamente). La figura 8 muestra la disposición habitual de contactos en un dispositivo IDE/ATA equivalente.
![]() Atención!!:
Los dispositivos SATA se han diseñado para ser conectados directamente en
estrella. Sin que exista ningún tipo de encadenamiento ("Daisy
chaining") ni "Jumpers" o interruptores de configuración (que
se realiza por software). Quiero recalcarlo porque el otro día (Junio
2005), me acerqué a mi proveedor habitual para adquirir una unidad SATA
3.5" de 300 GB, que pienso utilizar como reserva y "Back-Up" de
los equipos en que trabajo habitualmente. Además de los conectores
habituales, que podéis ver en la figura 7 (sin el P4 de toma de fuerza), esta
unidad Barracuda de Seagate presenta otro pequeño conector auxiliar con de 4
pines. Ante mi extrañeza al examinarlo, el vendedor me aseguró muy
serio que, a pesar de ser Serial ATA, estos contactos se utilizaban para
conectar la unidad como primaria/secundaria al estilo ATA/IDE (
Atención!!:
Los dispositivos SATA se han diseñado para ser conectados directamente en
estrella. Sin que exista ningún tipo de encadenamiento ("Daisy
chaining") ni "Jumpers" o interruptores de configuración (que
se realiza por software). Quiero recalcarlo porque el otro día (Junio
2005), me acerqué a mi proveedor habitual para adquirir una unidad SATA
3.5" de 300 GB, que pienso utilizar como reserva y "Back-Up" de
los equipos en que trabajo habitualmente. Además de los conectores
habituales, que podéis ver en la figura 7 (sin el P4 de toma de fuerza), esta
unidad Barracuda de Seagate presenta otro pequeño conector auxiliar con de 4
pines. Ante mi extrañeza al examinarlo, el vendedor me aseguró muy
serio que, a pesar de ser Serial ATA, estos contactos se utilizaban para
conectar la unidad como primaria/secundaria al estilo ATA/IDE (![]() 6.1). Me pareció muy extraño y en contra de lo que sabía al respecto, pero de todas formas,
necesitaba una toma auxiliar de fuerza para alimentar un pequeño ventilador
de refrigeración del "Housing" donde pretendía instalar la
unidad, y pensaba que quizás se trataba de esto. Así que busqué en el
sitio del fabricante. La respuesta al misterio es que se trata de pines
"Factory use only", que no deben ser tocados en absoluto.
6.1). Me pareció muy extraño y en contra de lo que sabía al respecto, pero de todas formas,
necesitaba una toma auxiliar de fuerza para alimentar un pequeño ventilador
de refrigeración del "Housing" donde pretendía instalar la
unidad, y pensaba que quizás se trataba de esto. Así que busqué en el
sitio del fabricante. La respuesta al misterio es que se trata de pines
"Factory use only", que no deben ser tocados en absoluto.
§3 Capa de órdenes
Los comandos de la arquitectura ATA tradicional se ejecutan en el modo denominado TCQ ("Tagged Command Queuing"); caracterizado porque los dispositivos ejecutan los comandos en el mismo orden en que se reciben del controlador. No obstante, se sabe de antiguo que esta forma no es la más eficiente y que es posible reordenar los comandos para conseguir un mejor rendimiento. La reordenación tiene por objeto reducir al mínimo el movimiento de las cabezas de lectura/escritura. Movimientos que son los principales responsables del retardo en los proceso de E/S a disco.
La primera versión del estándar SATA no incluía estas características, aunque la
tecnología SCSI (![]() 6.3)
llevaba más de una década utilizándola, lo que en parte era motivo de las
superiores prestaciones de estos dispositivos respecto de los IDE/ATA
tradicionales. Finalmente, el grupo de trabajo del estándar SATA II
decidió incluir esta característica en la nueva especificación. El
sistema es conocido como NCQ ("Native Command Queing") y permite que un dispositivo SATA (disco) reciba un
conjunto de órdenes y las reordene para conseguir el máximo rendimiento.
6.3)
llevaba más de una década utilizándola, lo que en parte era motivo de las
superiores prestaciones de estos dispositivos respecto de los IDE/ATA
tradicionales. Finalmente, el grupo de trabajo del estándar SATA II
decidió incluir esta característica en la nueva especificación. El
sistema es conocido como NCQ ("Native Command Queing") y permite que un dispositivo SATA (disco) reciba un
conjunto de órdenes y las reordene para conseguir el máximo rendimiento.
Nota: La reordenación NCQ presenta otras
ventajas además de las puramente mecánicas (minimizar el desplazamiento de
las cabezas). También puede agrupar las interrupciones que el dispositivo
envía al Sistema para recabar atención (![]() 2.4). El sistema TCQ utiliza un mínimo de dos interrupciones por comando, y en condiciones
normales, dependiendo de la carga de sistema, el retardo en la carga de las
rutinas de servicio puede oscilar entre microsegundos y milisegundos. En
cambio, el sistema NCQ utiliza un máximo de una interrupción por comando, y frecuentemente puede agrupar varios
comandos en una una sola interrupción.
2.4). El sistema TCQ utiliza un mínimo de dos interrupciones por comando, y en condiciones
normales, dependiendo de la carga de sistema, el retardo en la carga de las
rutinas de servicio puede oscilar entre microsegundos y milisegundos. En
cambio, el sistema NCQ utiliza un máximo de una interrupción por comando, y frecuentemente puede agrupar varios
comandos en una una sola interrupción.
§4 Codificación
Generalmente los protocolos de comunicación serie de alta velocidad, utilizan un esquema de codificación lógica conocido como 8b10b (IEEE 802.3 §36.2.4) [3]. El medio físico utiliza una señal de codificación NRZ [4] por diferencial de bajo voltaje LVDS ("Low Voltage Differential Signaling"). SATA utiliza tensiones en un rango de 325/600 mV. mientras que el estándar SAS ("Serial Attached SCSI") utiliza el rango 275/1600 mV.
La codificación 8b10b, inventada por IBM en 1983, transforma cada octeto en una palabra de 10 bits mediante un algoritmo especial basado en tablas de conversión ("Look up tables"), diseñadas de forma que cada palabra contenga aproximadamente la misma cantidad de ceros y unos (la relación es 5/5; 4/6 o 6/4), y que la tensión no permanezca constante por más de 5 bits (no existen cadenas con más de 5 ceros o unos seguidos). Por ejemplo, el octeto 0000 0000 es transformado en 01100 01011. Además tiende a que la distribución de ceros y unos sea lo mas homogénea posible dentro de cada palabra y que no existan corrientes resultantes en el cable. Para ello el algoritmo dispone de un sistema "Look-back". De forma que si se ha transmitido una palabra con balance negativo (6/4), la siguiente se transmite con balance positivo (4/6). Esta distribución está pensada para mejorar la detección y corrección de errores y permitir señales de sincronismo [7].
Como se deduce de la explicación anterior, el sistema 8b10b es capaz de codificar un mismo carácter de dos formas distintas. En realidad el proceso se realiza en dos partes; en la primera se codifican los primeros 5 bits del octeto en un proceso 5b6b cuyo rango de la entrada es 0-31 (0-1Fh). En la segunda se codifican los 3 bits restantes en un proceso 3b4b cuyo rango de entrada es 0-7. Ambos procesos tienen en cuenta el denominado valor de disparidad, que incluye la tasa de resultante de ceros o unos de la última codificación. Como ejemplo veamos la codificación 8b10b de los caracteres ASCII 136 (88h) y 169 (A9h). El primero, cuya representación binaria es 10001000, es descompuesto en 01000 y 100. El segundo, 10101001, es descompuesto a su vez en 01001 y 101. Utilizando la simbología de la norma, estos valores se representan respectivamente como D8.4 y D9.5 si son datos y K8.4, K9.5 si fuesen caracteres de control. Para estos valores, las tablas "Look up" muestran las siguientes equivalencias:
|
Codificación 5b6b
|
Codificación 3b4b
| ||||||||||||||||||||||||||||||||||||||||
rd = disparidad inicial ("Running disparity"). rd+ significa exceso de unos; rd- exceso de ceros.
Rd = disparidad resultante. El signo ¢ indica que la disparidad ha cambiado respecto a la inicial. El signo ø indica que la disparidad es neutra (la salida tiene el mismo número de ceros y unos). La disparidad inicial se mantiene.
Dependiendo del la disparidad inicial, la codificación 8b10b resultante es la indicada:
| Valor inicial | rd+ | rd- | |
| 88h | 10001000 | 0001101101 | 1110010010 |
| A9h | 10101001 | 1001011010 | 1001011010 |
En la codificación 8b10b, las señales de sincronismo están incluidas en la secuencia de datos. Esta técnica, conocida como CDR ("Clock Data Recovery") no utiliza señales de sincronización (reloj) separadas, por lo que debe utilizar las transiciones de 0 a 1 en la señal de datos para deducir las señales de reloj. Evidentemente, la mejor situación se produce cuando se transmite una sucesión de ceros y unos alternados. Pero como esto es imposible para los datos [8], se recurre a un artificio, procurando que las cadenas de ceros o unos sean de la mínima longitud posible (espacio que se conoce como "Run length"). En el ínterin, mientras la señal mantiene la tensión, el decodificador CRU ("Clock Recovery Unit") mantiene la velocidad de reloj igual que la última detectada.
Los tranceptores SATA incluyen en el transmisor una unidad de sincronización y un serializador. Este último se encarga de convertir los octetos de datos en palabras de 10 bits y de añadir los caracteres de control. Los bits son transmitidos en serie y recogidos en el receptor, que dispone de una unidad CRU y un deserializador. Con ayuda de la señal de reloj proporcionada por la CRU y de las señales de alineación, el flujo de bits recibido es codificado en palabras de 10 bits que contienen caracteres de control y de datos. Finalmente los datos son reconvertidos a su formato original.
La comunicación se realiza mediante paquetes de 2 palabras de dos bytes Dwords; 32 bits de datos que se transforman en 40 bits en el medio físico y representan la menor cantidad de información que puede transmitirse en esta arquitectura. Las 1024 (210) posibilidades de cada palabra, son suficientes para codificar los 256 caracteres de un octeto y permitir la existencia de caracteres especiales de control conocidos como caracteres K y caracteres coma.
Nota: La secuencia de 5 caracteres seguidos, 00000 o 11111 solo puede aparecer en una secuencia especial de 7 bits cuyo aspecto es 1100000 o 0011111 conocida como secuencia coma ("Comma sequence") que aparece en el carácter coma, un carácter de control que es único. Esta secuencia solo puede aparecer como parte de un carácter coma, y nunca en la concatenación de cualquier otro par de caracteres, por lo que juega un papel fundamental en la alineación de los datos por el receptor.

Fig. 5. Conexión normal: 1 puerto + 1 cable = 1 dispositivo por puerto. |
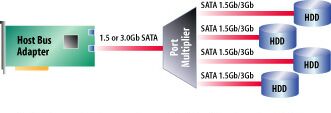
Fig. 6. 1 puerto + 1 cable + multiplicador = 4 dispositivos por puerto. |
§5 Multiplicadores de puerto
Los multiplicadores de puerto son dispositivos hardware que permiten conectar varios dispositivos a un un puerto SATA, saltando así la limitación 1 puerto = 1 dispositivo impuesta por la topología estrella. Presentados por primera vez en Febrero de 2003, permiten conectar hasta 16 dispositivos en cada puerto del adaptador host.
El multiplicador es transparente para los controladores y los propios dispositivos, que no tienen noción de que están utilizando un único puerto en la controladora.
§6 Selectores de puerto
Son dispositivos hardware que permiten conectar dos adaptadores host SATA a un dispositivo físico (disco) o sistema de ellos. Solo uno de los adaptadores está activo en cada momento, efectuándose la selección por software.
Presentan la ventaja de que el adaptador host deja de ser un dispositivo crítico en el sistema (puede estar duplicado). Además permite diseñar sistemas con balanceo de carga en los que puedan utilizarse dos equipos para acceder a un mismo dispositivo.
§7 Evolución
Los esfuerzos en el campo de la arquitectura ATA serie se iniciaron en el 2001. A continuación se muestra un resumen de su (por el momento) corta historia.
| Estándar | Comentario |
| SATA I | En Agosto de 2001 se publica la versión 1.0
del estándar. Aparece el primer producto comercialmente
disponible que actúa de puente entre el bus paralelo PCI y un
dispositivo serie ATA. La primera versión del estándar estaba pensado exclusivamente para uso interno (dentro del PC). Los cables podían tener un máximo de 1 m. y no se establecieron especificaciones para cables o conectores externos. Además la norma está orientada exclusivamente a dispositivos de almacenamiento. Por tanto quedan excluidas cámaras, escáneres, impresoras, Etc. |
| SATA II | En 2002 se anuncian los primeros controladores host SATA de 4 y 8 puertos disponibles comercialmente. En Octubre de este año se publica la versión II del estándar SATA. También aparecen dispositivos auxiliares, como los multiplicadores y selectores de puerto. Entre otras mejoras incluye encolado de comandos NCQ. |
| En Agosto de 2003 se anuncian los primeros controladores host SATA-II disponibles comercialmente, con una velocidad de transferencia de 3 Gbit/s [2]. En esta fecha los controladores host funcionan a 1.5 y 3 Gbits/s. |
En 2003 comienzan a verse los primeros dispositivos SATA en el sector de la informática de consumo. En 2005 es normal que las placas base incluye de forma estándar dos zócalos PCI (uno de ellos AGP) y 4 conectores ATA (2 x ATA/133 + 2 x SATA/150. Estos últimos con capacidad RAID 0 y 1. También que los fabricantes de placas incluyan con estas un cable de datos SATA para conexión de un dispositivo y un adaptador para cable de alimentación, ya que todavía se instalan fuentes que carecen de salidas específicas para dispositivos SATA internos. Se prevé que para 2006 la práctica totalidad de equipos de sobremesa nuevos monten de serie discos SATA.
§8 Webografía
- Serial ATA Org
 www.serialata.org y Serial ATA
International Organization
www.sata-io.org
www.serialata.org y Serial ATA
International Organization
www.sata-io.org
En realidad son la misma organización.
- Grupo de trabajo T13
www.t13.org
ATA Spec Development. Grupo de trabajo de las especificaciones ATA.
- Grupo de trabajo T10
www.t10.org
Serial Atteched SCSI Spec Development. Grupo de trabajo de las especificaciones SAS.
- Storage Networking Industry Association SNIA
www.snia.org
Es una organización que aglutina más de 300 empresas del sector de la industria del almacenamiento. Su objeto es promover estándares que faciliten al mercado soluciones abiertas de almacenamiento.
[1] El mismo sistema de direccionamiento que se venía utilizando en la técnica de canal de fibra ("Fibre Channel"). Existe un comando especial que permite interrogar los datos del dispositivo.
[2] En esta fecha, la compañía suministradora (Marvell) anunciaba haber vendido más de 5 millones de puertos SATA y haber constatado más de 50 diseños distintos que utilizan sus fabricados SATA.
[3] La codificación 8b10b es utilizada por SATA; Gigabit Ethernet; IEEE 1894b y "Fibre Channel" entre otros estándares.
[4] NRZ "Not Return to Zero". Una forma de transmisión donde la señal no retorna a cero (muestra un cambio) después de la transmisión de un bit, por lo que una sucesión de ceros o unos no produce cambios detectables en la línea, haciendo difícil la detección de bits individuales.
[5] Algo parecido a lo que ocurre con algunos dispositivos externos USB. Por ejemplo regrabadoras de CDs o DVDs. Este tipo de solución es conocida como DASD ("Direct Access Storage Device"). Los dispositivos de almacenamiento, discos generalmente, se disponen en chasis que puede albergar varias unidades y está dotado de su propia fuente de alimentación.
[6] AWG ("American Wired Gauge"). Un sistema de medir diámetros de cables utilizado en USA y otros países. A mayor número el diámetro es más pequeño.
[7] En las
transmisiones serie asíncronas clásicas (RS-232 ![]() 2.5.1), las señales de sincronismo están representadas por los bits de
inicio y parada ("Start" y "Stop" bits).
2.5.1), las señales de sincronismo están representadas por los bits de
inicio y parada ("Start" y "Stop" bits).
[8] Esto solo ocurre con el ASCII 74 = 4Ah (D10.2 en notación del Estándar) que es convertido en la cadena 0101010101 por el algoritmo 8b10b.
[9] Algunos fabricantes lo utilizan para el arranque escalonado de unidades ("Staggered spin-up"). Una técnica que intenta evitar la sobrecarga producida por el arranque simultáneo de las unidades de disco en un sistema cuando existen varias.